Porting the procedures from PIC16 to series 18

In the previous article, there were a number of faulty determinations. Initially, I thought it should be OK for me, but after some debugging, I realized that such a fault percentage is not tolerable for my project.
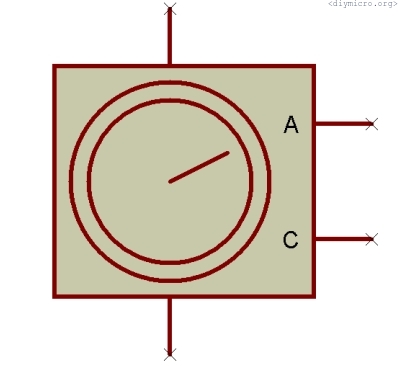
Sometimes the cleanest way to design a nice readable schematic in Proteus is to create a separate model with its own graphical symbol with pins attached to this model, not the fastest way but a kind of proper approach within a normal working process.
I was interested in the encoder as you may know, which is not available in the standard proteus component library, starting from a simple drawing of the symbol I would like to use at higher levels:
I needed to get my hands on the encoder, so I started to explore things around it.
First of all, what is the encoder? This is a thing that helps to convert the rotation angle and a direction of rotation to some numbers we can use for our further advance.
Usually, the encoder has three terminals, to connect it I have used the following circuit:
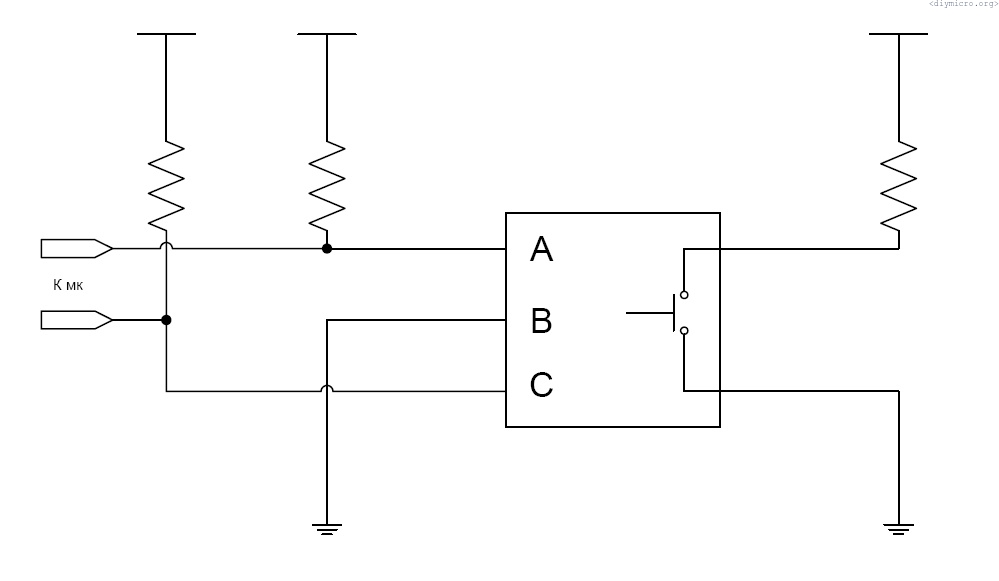
All resistors have a nominal equal to 4.7KOhm.
Continue reading